
③サクライジング8、プログラムの基礎トレーニング修了!
- News & Topics
- 2018.09.05
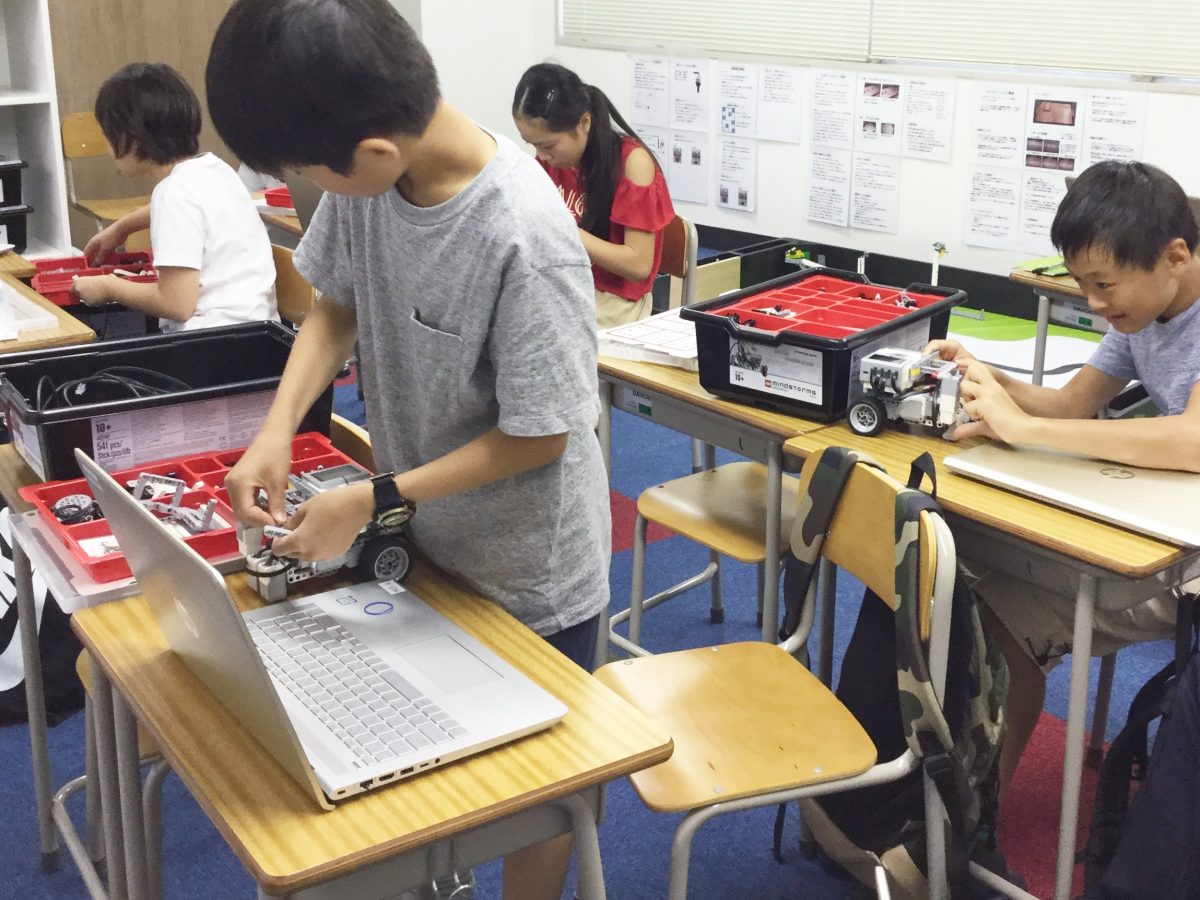
FLLチーム朝小「サクライジング8」が、ロボットプログラミングの基礎トレーニングを修了させました。
台風の影響で講座が延期となったりもしましたが、それをものともせず、メンバーたちはプログラミングの基本を習得し、FLLのロボット製作のスタートラインに立ちました。
前回のリポートでは、回転センサーをマスターするところまででしたが、その他のセンサーの使い方もあっという間に自分たちのものに出来ました。
1. タッチセンサー
押された・離されたを感知できるボタン式のセンサーです。
50㎝のケーブルでロボットに取り付け、押したり離したりすることでロボットを操作することに挑戦しました。
これまでの、何秒間、あるいは何度モーターを回転させるという制御の仕方を、タッチセンサーを押すまでというやり方に変えます。
タッチセンサーを押すまで前進、もう一度押すまで時計回りに回転という具合です。
さらに、その動きを繰り返し行わせることが出来るループのプログラムもここでマスターしました。
押したり離したりで、ロボットは前に進んだり曲がったりを繰り返し、メンバーたちは犬を散歩させているかのように
教室を縦横無尽に歩き回っていました。
2.超音波センサー
障害物までの距離を測定できるセンサーです。
壁に向かってロボットを走らせて、10㎝まで近づいたら止まるプログラムで仕組みを理解した後、
すでに習得済みの回転センサーを利用して10cmまで近づいたら直角にターン、更にはループも組み合わせて、
およそ2m×3mの枠の中を壁沿いにぐるっと一周できるかという課題にチャレンジしました。
メンバーたちは回転センサーのトレーニングの際にメモしていた直角ターンに必要なモーターの回転角度を使って、
あっという間にクリア出来ました。
それどころか、非常に精度の高い直角ターンを繰り返し、壁にぶつかることなく2周、3周とまわって来るロボットもありました。
3.カラーセンサー
色を識別したり光の強さを数値化できるセンサーで、今回は明るさを識別するのに利用します。
カラーセンサーを床に向けてロボットに取り付けて、床に引かれた黒いラインをたどる「ライントレース」に挑戦しました。
床に向けられたセンサーはそれ自体が光を照射し、はね返って来る光の強さを読み取ってくれます。
黒いライン上では反射する光は弱く(暗く)、床が白ければ光の反射も強く(明るく)なります。
まずメンバーたちは、測定値を画面に表示できる「ポートビュー」機能を使って、黒いライン上とラインが無いところでの床の明るさを測定しました。
その数値を使って、黒いラインを辿るプログラムを作るように指示されます。
難問です。
「ラインは最初はまっすぐに伸びているからロボットは直進、次にラインが左に曲がると、そこでロボットはラインを外れて白い床にたどり着くから、カラーセンサーでそれに反応させてロボットも左に曲げれば…」
実際にやってみると、確かに左にカーブするラインまでは進めますが、そのあとの曲がりくねるラインにはどう対応していいか分かりません。
しかも、これでは直線から始まって最初に左に曲がるラインにしか通用しません。
このとき、あるメンバーの失敗が解決のヒントにつながります。
まっすぐなラインを進ませようとスタート地点にロボットを置いてスタートさせたのですが、ロボットの置き方が斜めになっていたために、
左カーブを迎える前にロボットがラインを外れてしまい左への方向転換を始めてしまいました。
ロボットはそこでぐるぐると回り続けています。
「黒いところも通過してるんだけどな…」
「黒くなったらまた直進するようにして、ループさせればいいんじゃない?」
プログラムを修正して試してみると、ロボットはラインを外れては黒いラインへ戻るのを繰り返し、左カーブを曲がり切りました。
メンバーたちから歓声があがります。
ただ、次の右カーブは曲がれずロボットは白い床の上をくるくると回り始めました。
「まっすぐと左は出来るんだけどな…」
ロボットの動きをよく見ていたメンバーのひとりが言いました。
「どうせラインを外れるんだから、まっすぐじゃなくてもいいんじゃない?」
何かを思いついたようにパソコンのプログラミング画面に向かうと、直進の部分を右回りに変更しました。
「それだとまっすぐなラインが進めないんじゃない?」
メンバーの大半はまだ半信半疑です。
果たして、結果は…。
ロボットは黒いライン上では右に曲がり、ラインを外れた途端に左に戻ります。
これを繰り返すことで、ラインの黒と床の白い部分との境目を小刻みにジグザグと進み、まっすぐなライン、左に曲がるライン、
そして、右に曲がるラインに沿って(正確にはラインの黒と床の白の境目に沿って)きれいに進むことが出来ました。
まっすぐなラインをたどるために、必ずしもロボットをまっすぐに進ませる必要があるわけではないことを、新たな経験として学び取りました。
FLLのロボットゲームでは、このようなさまざまな発想がとても大切です。
これから始まるFLL用のロボット製作への本格的なトレーニングを通じて、メンバーたちは発想をかたちにする
プロセスを学んでいくことになります。
12月の東日本大会で、メンバーの発想力が集約された素晴らしいロボットが活躍してくれることを
今から楽しみにしていてください。

次回は、FLLの実践的なロボットミッションにもチャレンジしていきます。

無料体験では、お子様にはレゴ®WeDo2.0や教育版レゴ®マインドストーム®EV3を使って、ロボット製作とプログラミングの体験をしていただくことができます。また、保護者様にはCrefusのカリキュラムや費用・月謝に関してのご説明をさせていただきます。
体験授業申込み

ロボット製作を通じ子供たちの好奇心を喚起させ、 高度な理数系の知識を楽しみながら学び、習得できる科学教育カリキュラムの 構築と実践を目的としています。
最新のお知らせ
- 2022年度本コース4月入会生受付中! 2022年3月25日
- 2022年顧客満足度調査 最多3部門受賞! 2022年3月16日
- 2021年度CrefusCup全国大会3月26日(土)・27日(日)開催! 2022年3月25日
- Webサイト統合のお知らせ
© 2003-2026 Crefus Co., Ltd. All Rights Reserved. プライバシーポリシー | 利用規約 | 会社案内 | リクルート
当サイトの内容、テキスト、画像等の無断転載・無断使用を固く禁じます。
また、まとめサイト等への引用を厳禁いたします。