
④サクライジング8、ミッションモデルを完成!

- News & Topics
- 2018.10.11
夏休みまででロボット制御の基礎を修得したサクライジング8のメンバーたち。
いよいよロボットゲームの実戦練習に入って行きたいところです。
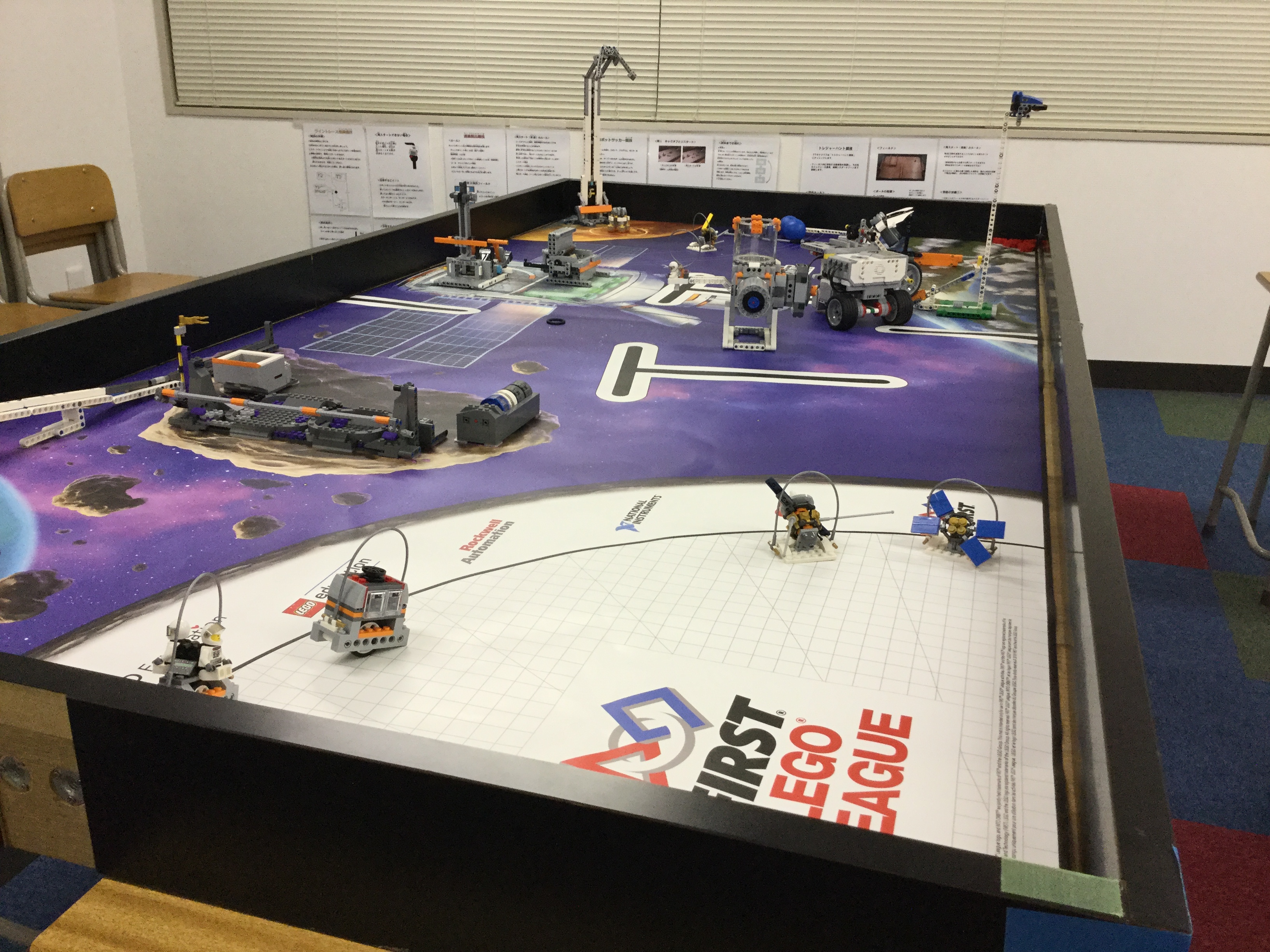
9月半ば、ロボットゲーム用のミッションモデル組み立てキットが教室に届き、メンバーみんなで組み立てました。
組立書を見ながら、それぞれが手分けをして組み立て始めました。
もしも、組み立てに間違いがあったら…。
本物と異なるモデルでそれと気付かずに練習することになってしまいます。
責任重大、楽しい作業のなかにも緊張感が漂います。
組み立て終盤に近付くと、実際のミッションモデルが次々と出来上がってきます。
事前に各ミッションのルールを読み込んで来て、それをメンバー同士で確認しあったり、あるいは、すでに攻略法を話し合っている場面も見られました。
この日は完成したところでタイムアップ。
本格的な練習は次回以降です。
さて、このミッションモデル組み立てに先立ち、9月初回の講座は、疑似モデル(教室置きの予備ブロックパーツで本物に出来るだけ似せて作った仮想のミッションモデル)を使用してのトレーニングを行ってみました。
この日チャレンジしたミッションは2つ…
①宇宙旅行
坂道の上にセットされた小さな車をロボットによって発車させて坂道の下まで走らせます。
発車の方法はアイデア次第ですが、車がセットされた土台は可動式になっていて、ここを少し上へ傾けることができれば車は簡単に走り始めます。
メンバーたちは早速チャレンジ開始。
まずは、スタート地点からミッションモデルが設置された場所まで正確にロボットを移動させなければなりません。
距離が足りずに、何もない場所でアクションを起こしむなしく空を切るロボット…。
進み過ぎて、ミッションモデルに派手にぶつかり、そのまま押し倒してしまうロボット…。
しかし、失敗を恐れず、どんどん試して修正を繰り返す姿勢には成長が感じられます。
得意の回転センサーでの調整で、ほどなく、進むべきベストな距離を見つけ出しました。
どのメンバーも、ロボットにアーム状のブロックを取り付けています。
定位置まで進んだロボットはその場で回転し、アームが坂道上の車をそっと押し出します。
アームの取り付け位置や長さに調整が必要なロボットもありましたが、どのロボットもこれをクリアできました。
…しかし、小さな車がセットされた土台を下から押し上げて発車させるやり方をしたメンバーがいません。
それもそのはず、この動きにはロボットを移動させるのに使うモーターとは別に、もう一つ追加でモーターが必要なのですが、このモーターの使い方をメンバーたちはまだ練習していませんでした。
Mモーターと呼ばれる、左右のタイヤを回転させる2つのモーターよりも一回り小さなこのモーターをどう使うかが、FLLのロボットゲームでのミッションクリアにおいては大きなポイントとなります。
というわけで、練習しましょう。
次のミッションは、Mモーターを使わずにはクリアは不可能です。
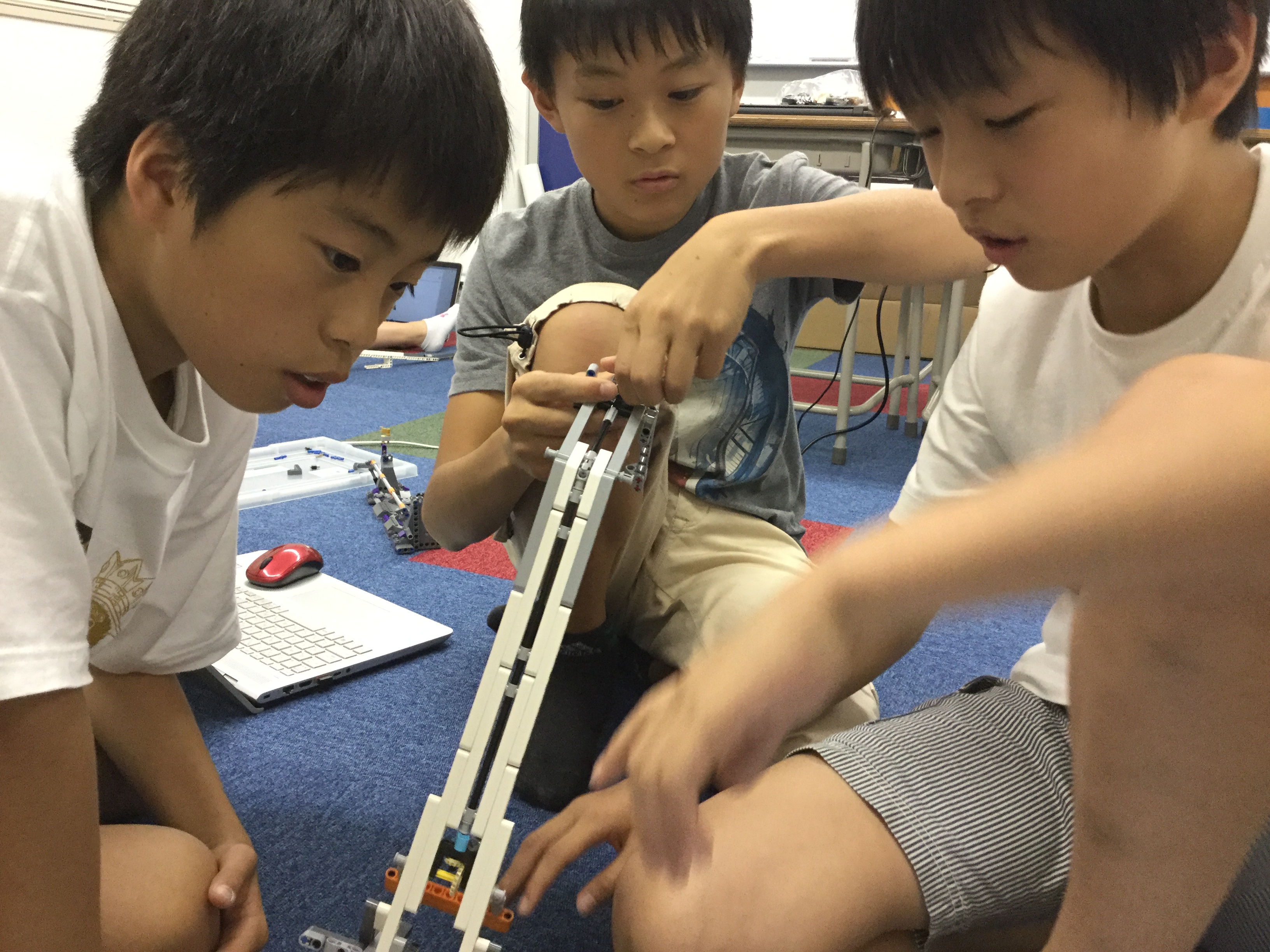
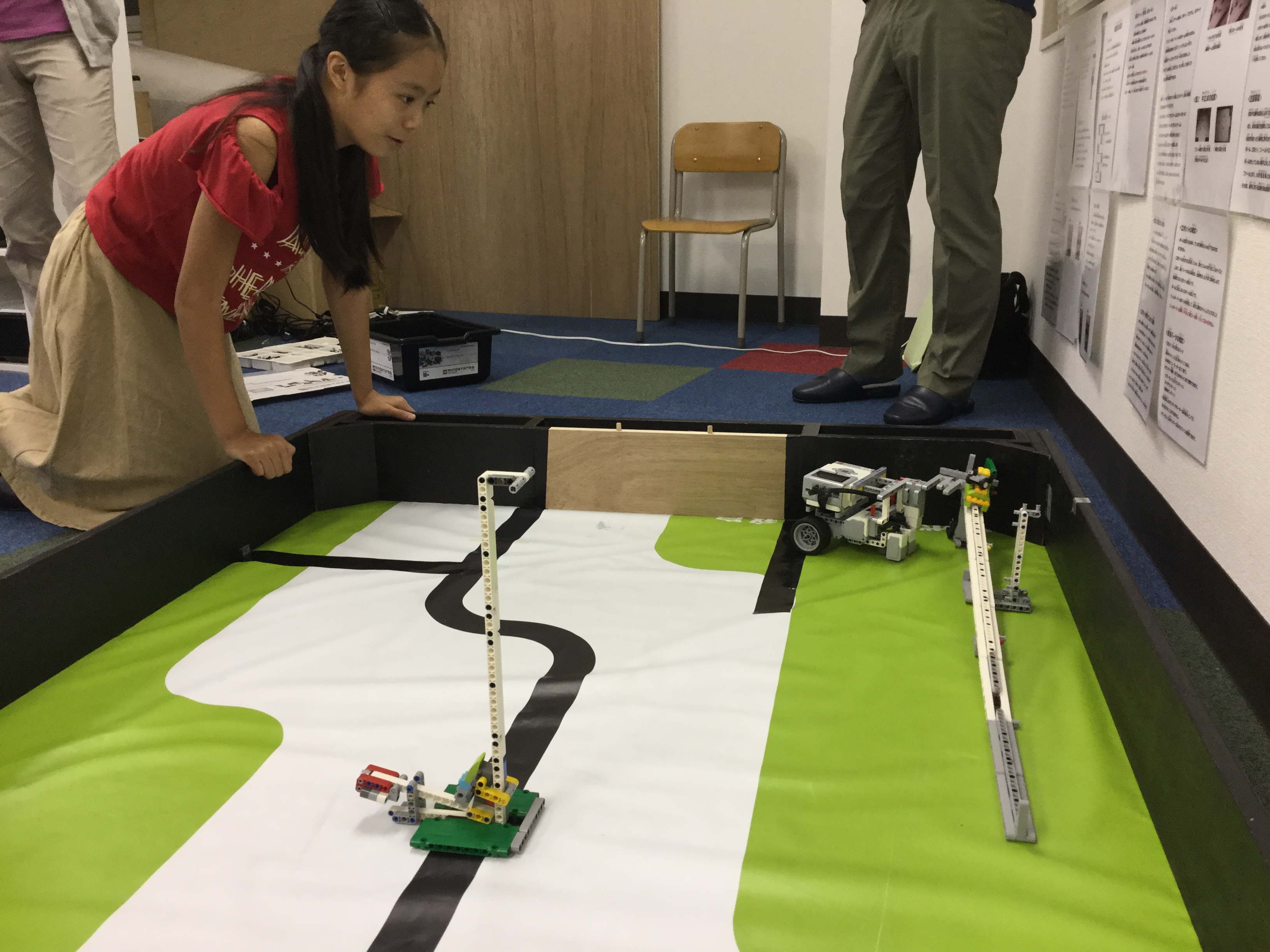
②宇宙速度
ロケットが地球の重力圏を脱して宇宙に届くのには十分な発射の勢いが必要ですが、これを再現してミッションです。
高さ30センチほどにつなげて作られたレールが縦に伸び、それに沿うようにロケットが上下します。
ロケットは最初、最下部の発射台に乗っていて、この発射台をロボットが強く叩くと弾かれるようにしてロケットが発射されます。
十分な強さで叩くとロケットはレールの最上部まで到達してそこでとどまるようになっていますが、叩き方が弱いと上まで届かず、発射台まで戻って来てしまいます。

ロボットがこの発射台を叩くにはどうすればいいのかな…。
Mモーターの使い方は教えてもらいますが、ロボットにつないで、プログラミングでパワーと回転量(回転センサーまたは秒数)を決めれば動くという、最低限のことしか教えてもらえません。
ロボットのどの位置に、どんな向きに付ければよいか、また、取り付けた後、そのモーターへどんなパーツをつないで発射台を叩けば良いのか…。
これまでの練習の中で最も難しい課題です。
発射台は上から叩くようになっているのだから、とりあえず上から下へ振り下ろすような何かを付ければ良さそうだ。
モーターのパワーには限度があるから、それは最大値に設定するとして、さらに勢いをつけるとしたら、
…叩く部分は重い方が良いんじゃないかな。
ギアを使ったら、回転をもっと速く出来るはずだぞ。
試行錯誤が始まります。
しかし、狙った場所を叩けるロボットは出来ますが、はやり強さが足りずロケットは何度も発射台へ戻って来ます。
ハンマーとしてタイヤを3つつなげてみたり、通常はロボットの車輪代わりに使用する鉄球を使って叩いてみたりと、さまざまなアイデアを駆使して挑みますが、ロケットは宇宙までたどり着けません。
チャレンジはこれからも続くので次回へ期待、今日はこれまでと思ったその時、1台のロボットが輝きを放ちます。
Mモーターにアーム状のブロックをつなぎ、その先にタイヤを1つハンマ―として取り付けただけ。
比較的シンプルなこのロボットが、スタートして発射台の近くへ進むとき、メンバーたちは(おそらく作った本人も)、今日繰り返した何十回の失敗のうちのひとつとなるだろうと思って眺めていたはずです。
発射されたロケットがレールを上りきり、そこで静止した瞬間、教室内には歓声よりも先にどよめきが起こりました。
他のメンバーたちに比べると平凡に見えたそのロボットは、モーターの回転の限られたパワーを活かすためにアームがいくぶん長く、また、力がしっかりと伝わるようにそのアームも補強してたわみが少なくなるようにしてありました。
作った本人はもちろん、チームみんなが誇らしげにそのロボットを見つめます。
「もう1回やってみて!」メンバーから当然のリクエストが来ます。
しかし、2度、3度繰り返しましたが、成功したのは先ほどの1回きりでした。
この日のこの成功は、100回に1回の奇跡的なものだったのかもしれません。
しかし、この一歩から始めて、100回に2回、100回に3回…、最後は100%成功するロボットに仕上げて行かなければなりません。
99%の成功率でも、本番では1%の失敗に涙するのがFLLの厳しさです。
「思ったよりも細かく調整しないといけないのが分かった」
「プログラムの前に、ロボットのかたちがすごく大事だと思った」
「1人のアイデアより、上手くいっている人のを取り入れながらやった方が効率が良さそう」
FLLのロボットゲームが一筋縄ではいかないことを再度確認したメンバーたちは、この後の本格的なトレーニングにさらなる決意を持って臨んでくれそうです。
サクライジング8(朝小FLLチーム)の過去の記事はこちら

無料体験では、お子様にはレゴ®WeDo2.0や教育版レゴ®マインドストーム®EV3を使って、ロボット製作とプログラミングの体験をしていただくことができます。また、保護者様にはCrefusのカリキュラムや費用・月謝に関してのご説明をさせていただきます。
体験授業申込み

ロボット製作を通じ子供たちの好奇心を喚起させ、 高度な理数系の知識を楽しみながら学び、習得できる科学教育カリキュラムの 構築と実践を目的としています。
最新のお知らせ
- 2022年度本コース4月入会生受付中! 2022年3月25日
- 2022年顧客満足度調査 最多3部門受賞! 2022年3月16日
- 2021年度CrefusCup全国大会3月26日(土)・27日(日)開催! 2022年3月25日
- Webサイト統合のお知らせ
© 2003-2026 Crefus Co., Ltd. All Rights Reserved. プライバシーポリシー | 利用規約 | 会社案内 | リクルート
当サイトの内容、テキスト、画像等の無断転載・無断使用を固く禁じます。
また、まとめサイト等への引用を厳禁いたします。